Mã SP: ST.BE.I0007
Giá: Liên hệ
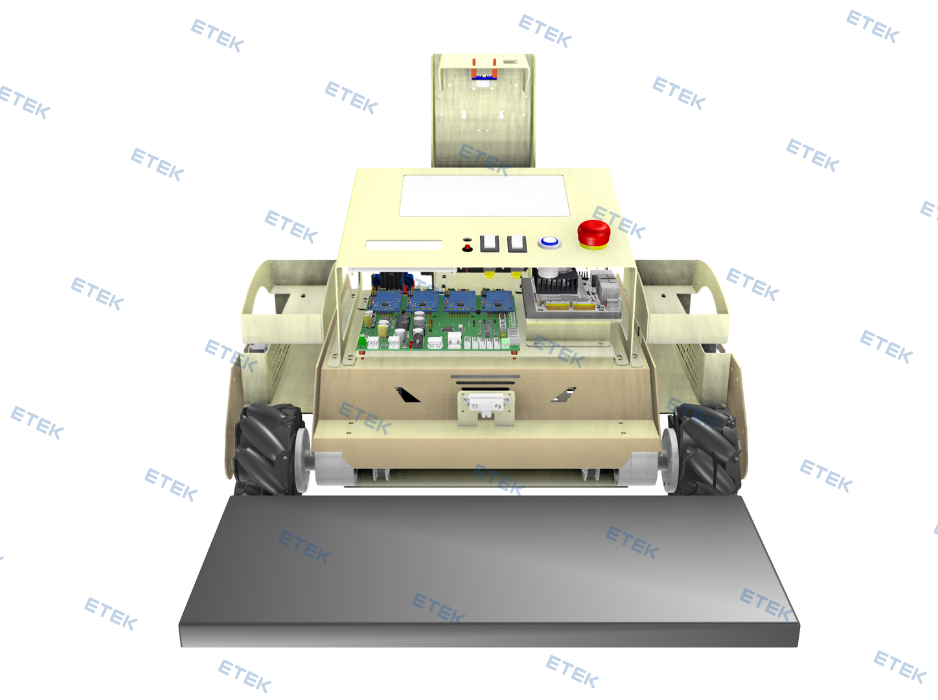
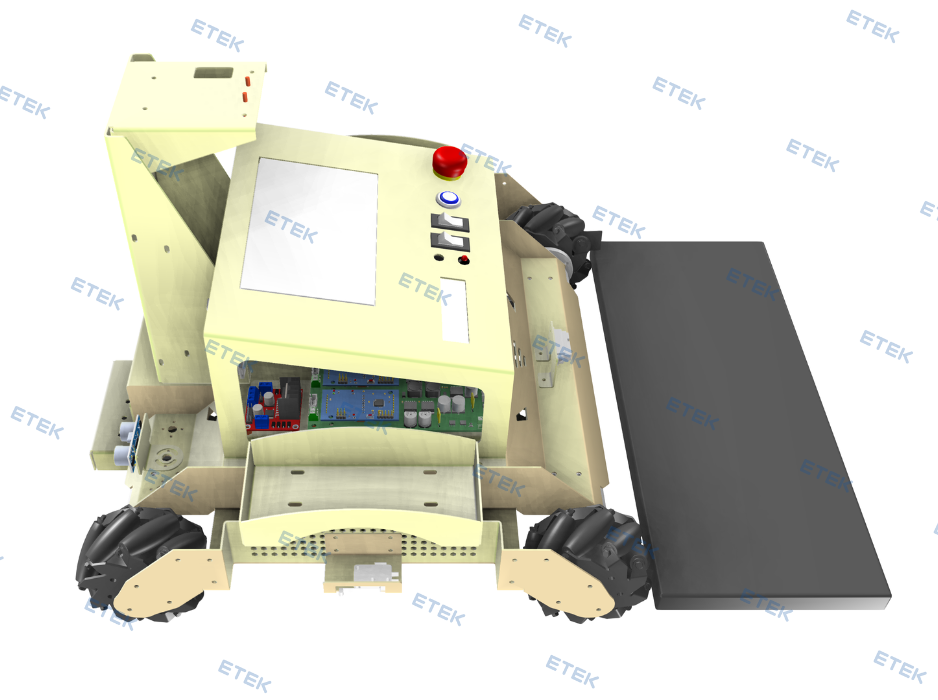
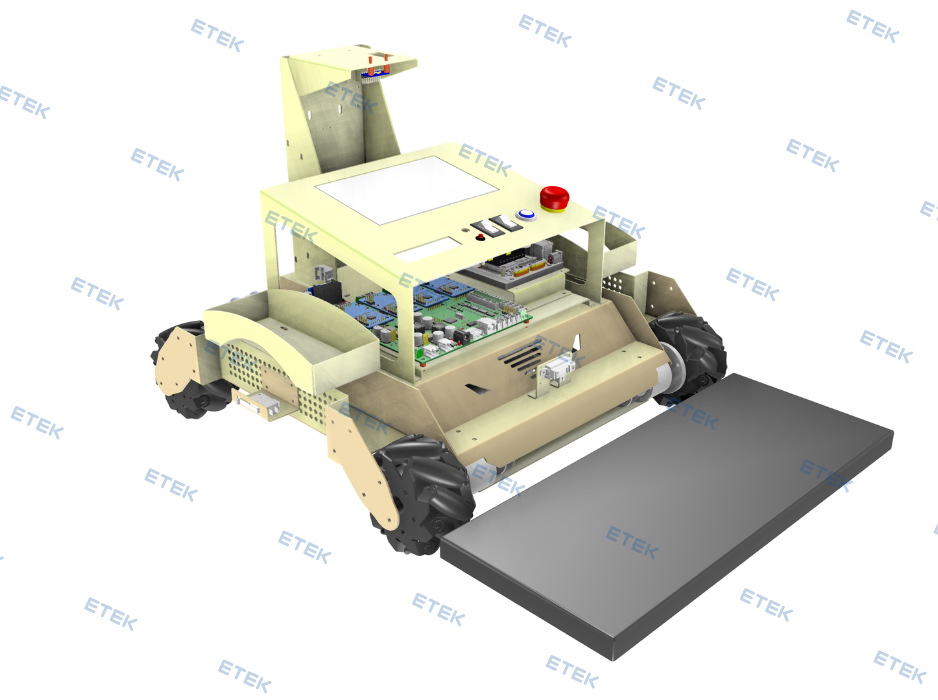
Mô hình robot tự hành ứng dụng AI và xử lý ảnh là một loại robot thông minh được trang bị các công nghệ AI và khả năng xử lý ảnh, giúp robot có thể tự động di chuyển, nhận dạng môi trường xung quanh và thực hiện các tác vụ mà không cần sự can thiệp của con người.
– Mục đích sử dụng:
+ Lập trình AI ứng dụng trên robot tự hành tích hợp xử lý ảnh và công nghệ LiDAR
– Được thiết kế và sản xuất theo quy trình đáp ứng các hệ thống/tiêu chuẩn:
+ ISO 9001:2015 – Hệ thống Quản lý chất lượng
+ ISO 14001:2015 – Hệ thống Quản lý môi trường
+ ISO 45001:2018 – Hệ thống Quản lý an toàn và sức khỏe nghề nghiệp
+ ISO/IEC 27001:2022 – Hệ thống Quản lý an toàn thông tin
+ ISO 50001:2018 – Hệ thống quản lý năng lượng
– Học sinh thực hành bài tập và trải nghiệm với Robot tự hành ứng dụng AI và công nghệ LiDAR:
+ Giới thiệu về thiết bị
+ Machine learning/ Deep Learning sử dụng TensorFlow
+ Ngôn ngữ lập trình PyThon
+ Sử dụng thư viện OpenCV
+ Công nghệ xử lý ảnh thời gian thực.
+ Công nghệ điều khiển bánh xe đa hướng
+ Công nghệ LiDAR
– Các bài thực hành với vi điều khiển bao gồm:
+ Thực hành lập trình ARM điều khiển tốc độ động cơ DC.
+ Thực hành lập trình ARM ổn định tốc độ động cơ dùng thuật toán PID.
+ Thực hành lập trình phương trình động học điều khiển bốn bánh đa hướng.
+ Thực hành lập trình ARM cân bằng tốc độ 4 động cơ.
+ Thực hành lập trình ARM đọc cảm biến khoảng cách siêu âm, hồng ngoại.
+ Thực hành lập trình ARM điều khiển robot phối hợp cảm biến tránh vật cản.
+ Thực hành lập trình ARM giao tiếp với card Jetson Xavier
– Các bài thực hành tổng hợp:
+ Thực hành nhận diện khuôn mặt (Face detection)
+ Thực hành nhận dạng khuôn mặt (Face recognition)
+ Thực hành nhận diện vật thể (object detection)
+ Thực hành nhận diện biển báo tín hiệu
+ Thực hành điều khiển robot đi theo Lane
+ Thực hành điều khiển hoạt động robot theo biển bao tín hiệu
+ Thực hành ứng dụng cảm biến LiDAR trong xây dựng bản đồ
+ Chất liệu khung: Nhôm.
+ Khung được cắt gấp, đột lỗ tiêu chuẩn và chuyên dụng cho lắp ghép.
+ Học viên có thể lắp ghép robot theo hình dạng có sẵn hoặc hình dạng bất kì
+ Động cơ di chuyển: Động cơ DC servo 12V
+ Số lượng động cơ: 04 động cơ
+ Bánh xe di chuyển: Bánh xe đa hướng.
+ Các thiết bị tích hợp trong mô hình:
01 cảm biến đo khoảng cách siêu âm
01 cảm biến đo khoảng cách dùng hồng ngoại
02 công tắc hành trình
01 cảm biến dò line
01 cảm biến la bàn điện tử
01 Pin Lithium 12V/3000 mA
+ CPU: 6-core NVIDIA Carmel ARM®v8.2 64-bit CPU 6MB L2 + 4MB L3
+ GPU: 384-core NVIDIA Volta™ GPU with 48 Tensor Cores
+ Video: 2x 4K60 | 4x 4K30 | 10x 1080p60 | 22x 1080p30 (H.265) | 2x 4K60 | 4x 4K30 | 10x 1080p60 | 20x 108p30 (H.264) Encode/ 42x 8K30 | 6x 4K60 | 12x 4K30 | 22x 1080p60 | 44x 1080p30 (H.265) | 2x 4K60 | 6x 4K30 | 10x 1080p60 | 22x 1080p30 (H.264) Decode
+ Bộ nhớ: 8 GB 128-bit LPDDR4x 59.7GB/s
+ Cổng hiển thị: 2 multi-mode DP 1.4/eDP 1.4/HDMI 2.0
+ CSI: Up to 6 cameras (24 via virtual channels) | 12 lanes (3×4 or 6×2) MIPI CSI-2 | D-PHY 1.2 (up to 30 Gbps)
+ PCIE: 1 x1 (PCIe Gen3) + 1 x4 (PCIe Gen4), total 144 GT/s
+ Bộ nhớ dữ liệu: 16 GB eMMC 5.1
+ Chuẩn giao tiếp thông dụng: CAN, UART, SPI, I2C , I2S, GPIOs
+ Cổng USB: USB 3.1, USB 2.0
+ Truyền thông: 10/100/1000 Gigabit Ethernet | Media Access Controller (MAC)
+ MCU: 32bit ARM Cortex-M3
+ Tốc độ: Lên tới 84MHz
+ Bộ nhớ Flash: 512KB
+ Bộ nhớ SRAM: 64 + 32 KB
+ Màn hình hiển thị thông số: LCD 20×4
+ Driver điều khiển động cơ tích hợp trên board
+ Khả năng điều khiển: Tối đa 04 động cơ
+ Định mức điều khiển: 12V/3A
+ Cổng mở rộng giao tiếp cảm biến
– Màn hình LCD:
+ LCD 7 inch HDMI cảm ứng điện dung
+ Điện áp sử dụng: 5VDC từ cổng Micro USB
+ Ngõ vào: HDMI.
+ Hỗ trợ cảm ứng điện dung và cấp nguồn 5VDC qua cổng Micro USB.
+ Độ phân giải lên đến 800 x 480 Pixels.
+ Độ phân giải tối đa: 1080p/30fps – 720p/60fps
+ Loại tiêu cự: lấy nét tự động
+ Công nghệ thấu kính: Kính Full HD
+ Micrô tích hợp: Âm thanh nổi
+ Phạm vi quan sát: 78°
– Cảm biến Laser Radar:
+ Điện áp sử dụng: 5VDC
+ Chuẩn giao tiếp: UART
+ Phương pháp phát hiện vật cản: Laser
+ Khoảng cách phát hiện vật cản tối đa: 12m
+ Góc quay: 360 độ.


