THIẾT BỊ CHUYÊN DỤNG/ Bộ thiết bị thực hành lắp đặt điện (đào tạo lắp ráp các loại rô bốt điều khiển bằng vi điều khiển)
.png)
.png)
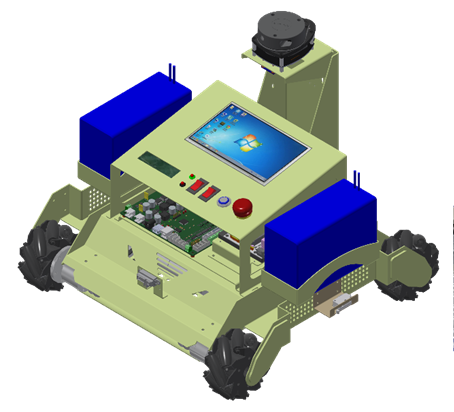
Bộ thiết bị thực hành lắp đặt điện (đào tạo lắp ráp các loại rô bốt điều khiển bằng vi điều khiển)
AT.I1000
GIÁ: 205,222,000VNĐ
.png)
.png)
.png)


.png)
.png)
.png)
.png)



.png)
.png)
.png)
.png)